UART_Embassy
Giới thiệu về Embassy
- Trong quá trình tìm hiểu về lập trình nhúng bằng Rust, thì mình vô tình biết đến framework này.
- Embassy một framework lập trình theo kiểu bất đồng bộ (async), dễ tiếp cận hơn việc setup một RTOS cho MCU.
Async Embassy
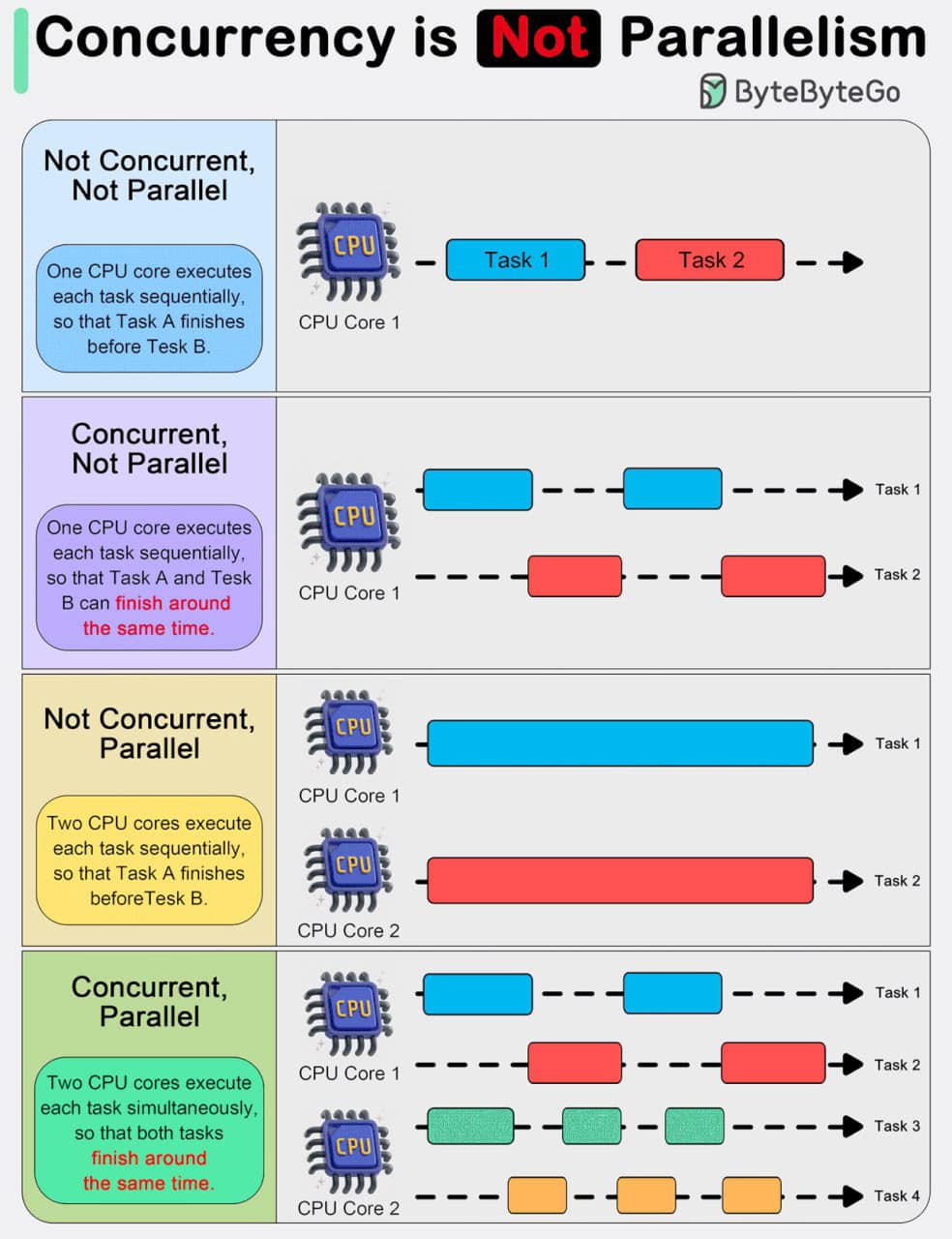
- Dựa trên một file tài liệu mà mình tình cờ có được async-embedded thì Async là một cách tiếp cận về việc Xử lý đồng thời (Concurrency).
- Hơn nữa dựa trên Github Embassy thì framework này hỗ trợ kha khá dòng chip:
- Dòng nRF: embassy_nrf
- Dòng STM32: embassy-stm32
- Dòng RP2040: embassy_rp
- Dòng ESP32: esp-rs
- Nhìn chung đây là framework tuyệt vời để bắt đầu code nhúng với Rust.
UART
Trong quá trình sử dụng framework embassy, mình thường hay dùng UART nên mình sẽ note lại một số thứ cần lưu ý về UART.
Read
- Trong STM32 phần Read UART có khá nhiều function, và đây là 3 func mà mình sẽ thường dùng.
- blocking_read
- read
- read_until_idle
Func blocking_read
- Function này sẽ mình đọc đầy đủ dữ liệu.
- Ban đầu mình có test thử giữa
blocking_readvớiread, thì mình đọc được dữ liệu vớiblocking_read, còn vớireadthì không.
Func read
- Mình sẽ thường dùng function read này kết hợp với timeout.
- Tức là mình sẽ cho một khoảng thời gian để đọc data từ uart, nếu không thấy data trong khoảng thời gian nhất định thì sẽ thoát ra.
- Nhờ cách này mà mình tránh được việc bị treo chương trình.
- Đây là một đoạn code mẫu:
// health_check_cr95hf
// True: CR95HF OK
// Flase: CR95HF not reponse -> Maybe lost connect with CR95HF
async fn health_check_cr95hf(
rfid_uart: &mut Uart<'static, USART2, DMA1_CH7, DMA1_CH6>,
debug_uart: &mut Uart<'static, USART1, DMA1_CH4, DMA1_CH5>,
) -> bool {
let echo_command_code: &[u8];
echo_command_code = cr95hf::cr95hf_echo_command();
dbg_print(debug_uart, "Health Check CR95HF").await;
// Buffer data reponse from CR95HF
let mut response_code = [0u8; 1];
let _size_data: usize = 1;
for _i in 1..3 {
// Send command
rfid_uart.blocking_write(&echo_command_code).unwrap();
// Read reponse from CR95HF
match with_timeout(
Duration::from_millis(30),
rfid_uart.read(&mut response_code),
)
.await
{
// match rfid_uart.blocking_read(&mut response_code) {
Ok(_size_data) => {
// let _ = debug_uart.blocking_write(&response_code);
// Data reponse from CR95 OK
if response_code == echo_command_code {
return true;
} else {
return false;
}
}
Err(_e) => {
dbg_print(debug_uart, "Read UART Error - Func health_check_cr95hf").await;
// delay 10ms
Timer::after(Duration::from_millis(10)).await;
continue;
}
}
}
return false;
}
Func read_until_idle
- Để hiểu hơn về IDLE UART, mình đã tham khảo tài liệu:
https://tapit.vn/huong-dan-su-dung-chuc-nang-uart-idle-dma/#google_vignette
https://controllerstech.com/stm32-uart-5-receive-data-using-idle-line/
- Tức là với func này, nó sẽ chia ra thành từng block để đọc dữ liệu.
- Dưới đây là đoạn code với chức năng là: gửi command sau đó đọc 4 bytes dữ liệu, tuy nhiên chỉ lấy 2 bytes đầu để xử lý dữ liệu
// no_tag_cr95hf: Check no_tag
// Return true: if not detectd tag card
async fn no_tag_cr95hf(
rfid_uart: &mut Uart<'static, USART2, DMA1_CH7, DMA1_CH6>,
debug_uart: &mut Uart<'static, USART1, DMA1_CH4, DMA1_CH5>,
) -> bool {
// First: Setup Protocol ISO15693
setup_protocol_iso15693(rfid_uart).await;
// Second: Read data and check errors code
// Define the initial byte array
let sendrecv_command = [0x04, 0x03, 0x02, 0x20, 0x00];
for _i in 1..3 {
// Send command
rfid_uart.blocking_write(&sendrecv_command).unwrap();
// Buffer data reponse from CR95HF
let mut response_data = [0u8; 4];
let _size_data: usize = 2;
// Read reponse from CR95HF
match rfid_uart.read_until_idle(&mut response_data).await {
Ok(_size_data) => {
// let is_no_tag = cr95hf::errors_tag_code(&response_data.clone());
let is_no_tag = cr95hf::errors_tag_code(&response_data);
// let _ = debug_uart.blocking_write(&response_data);
// let _ = debug_uart.blocking_write(is_no_tag.to_string().as_bytes());
if is_no_tag == true {
dbg_print(debug_uart, "NO TAG CARD").await;
return true;
} else {
return false;
}
}
Err(_e) => {
// delay 10ms
Timer::after(Duration::from_millis(10)).await;
}
}
}
return false;
}
August 7, 2024 ∙